 WhatsApp: +86 16626708626
WhatsApp: +86 16626708626 Email:
Email:  Phone: +86 16626708626
Phone: +86 16626708626Description
3. Key Technical Specifications
| Parameter | Value |
|---|---|
| Rated Power | ~0.7 kW |
| Rated Voltage | 400 V AC |
| Rated Speed | ~3,000 rpm |
| Feedback Type | Resolver or encoder (variant dependent) |
| Protection Class | IP65 (motor housing typical) |
| Cooling Method | Natural convection |
| Mounting Type | Flange mount |
| Shaft Type | Keyed shaft |
| Operating Temperature | 0 to +40°C |
| Storage Temperature | −20 to +70°C |
| Weight | ~3–5 kg |
| Compatibility | ELAU PacDrive (C200/C400/C600) |
4. Product Introduction
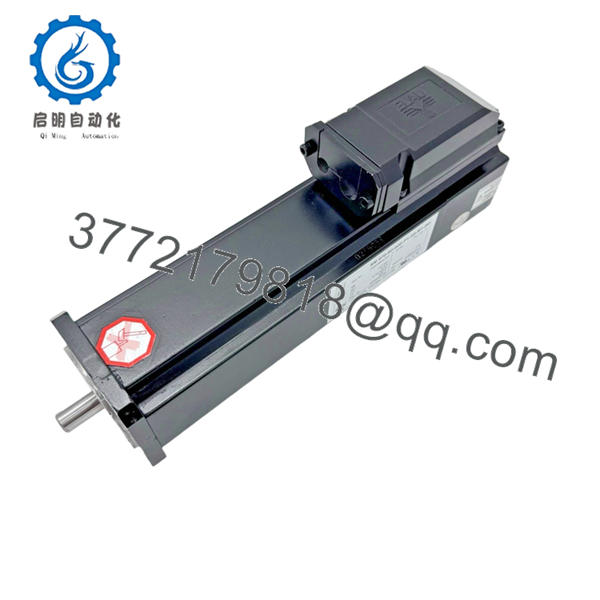
The ELAU SM-070-60-020-P1-45-M1-B0 is a PacDrive-series AC servo motor designed for high-precision motion control in packaging, material handling, and automated assembly systems. It integrates with ELAU/Schneider PacDrive controllers using dedicated servo drives for synchronized multi-axis operation.
In field deployments, this SM-070 frame size is commonly selected for mid-range torque applications where footprint and thermal limits matter. Compared to larger SM-100 units, it reduces panel load while still maintaining stable positioning accuracy and repeatability under continuous duty.

- SM-070-60-020-P1-45-M1-B0
- SM-070-60-020-P1-45-M1-B0
5. Installation & Configuration Guide
Stage 1: Pre-Installation Preparation (10–15 minutes)
- ⚠️ Safety First: Notify operations, stop machine, lock out/tag out power. Wait 5 minutes for DC bus discharge.
- Tools Required: ESD strap, torque wrench, PH1 screwdriver, multimeter, alignment tool, smartphone.
- Data Backup:
- Export drive parameters from PacDrive controller
- Record motor nameplate data
- Photograph encoder connectors and cable routing
Stage 2: Removing the Old Motor (10 minutes)
- Disconnect motor power and feedback cables.
- Label cables clearly — especially resolver/encoder lines.
- Remove coupling or belt connection.
- Unbolt flange mounting screws evenly.
- Pull motor straight out to avoid shaft misalignment.
- Inspect coupling, shaft, and mounting surface.
- ⚠️ Note: Keep the old motor accessible for connector pinout verification.
Stage 3: Installing the New Motor (10–15 minutes)
- Verify model number matches exactly (suffix differences matter for encoder type).
- Mount motor to flange, tighten bolts in cross pattern to specified torque.
- Align shaft with coupling — avoid axial stress.
- Reconnect power and feedback cables securely.
- Ensure proper grounding of shielded cables.
- Self-Checklist:
- Shaft aligned
- Bolts torqued
- Encoder cable secured
- Grounding verified
Stage 4: Power-On & Testing (10–15 minutes)
- Pre-Power Check: Measure insulation and confirm no short circuits.
Power-On Steps:
- Power the drive system only (no load initially).
- Check servo drive LEDs for ready status.
- Connect to PacDrive software (EPAS-4 / Automation Expert).
- Verify motor recognition and feedback signal.
- Perform low-speed jog test.
- Gradually apply load and monitor temperature and vibration.
- ⚠️ Troubleshooting Note:
- Encoder fault → check feedback cable pinout
- Motor not recognized → parameter mismatch in drive
6. Frequently Asked Questions (FAQ)
Q1: Can I hot-swap this servo motor?
No. This is not designed for hot swapping. The DC bus in PacDrive systems carries significant stored energy. Disconnect power fully before replacement or you risk damaging the drive.
Q2: Is this model obsolete, and is it genuinely new?
Yes, many ELAU SM-series motors are discontinued after Schneider Electric integrated PacDrive into its portfolio. New units are typically New Surplus. Verify serial numbers and request inspection records.
Q3: What is the direct replacement if this model is unavailable?
In most cases, Schneider Electric Lexium or updated PacDrive-compatible motors are used. However, mechanical dimensions and encoder protocols must match. Always cross-check with the original drive configuration.
Q4: Will I lose my motion configuration when replacing the motor?
No, the logic resides in the controller and drive. However, motor-specific parameters (resolver type, pole pairs) must match, or the axis will fault during initialization.
Q5: Why are surplus units cheaper than OEM pricing?
Because they come from excess project inventory or discontinued stock. They are not counterfeit, but they do not carry full OEM lifecycle support. That’s the trade-off.
Q6: What are the most common installation mistakes?
Misaligned shaft and incorrect encoder wiring. I’ve seen both cause immediate faults or long-term bearing damage. Take your time during alignment.
Q7: How do I verify compatibility with my existing PacDrive system?
Check three things:
- Motor power rating vs. drive size
- Feedback type (resolver vs. encoder)
- Connector pinout and cable type
Quality Control & Testing SOP (Transparency)
1. Inbound Inspection & Traceability
- Verified against original Schneider/ELAU packing references
- Serial number consistency check across nameplate and documentation
- Visual inspection: no shaft wear, no corrosion, no re-machining marks
- Connector integrity checked (no bent pins)
2. Live Functional Testing
- Tested on a Schneider PacDrive C400 test bench
- Power-on verification and encoder feedback validation
- Communication handshake with drive controller
- Continuous run test for 24 hours under simulated load
- Thermal monitoring using Fluke infrared thermometer
- Test report generated and archived
3. Electrical Parameter Testing
- Insulation resistance: >10 MΩ at 500 V Megger
- Ground continuity verified
- Winding resistance measured phase-to-phase
4. Firmware & Configuration Verification
- Encoder type and motor ID recorded
- Connector pinout verified against OEM documentation
5. Final QC & Packaging
- QC sign-off with traceable ID
- Sealed in anti-static packaging
- Foam-protected heavy-duty carton
- QC Passed label with inspection date
Test photos and run videos are available upon request.
Technical Pitfalls & Survival Guide
❗ Firmware / Parameter Mismatch
Even though this is a motor, the drive parameters must match exactly. I’ve seen systems throw axis faults because the resolver type didn’t match the drive configuration. Always export parameters before removal.
❗ Encoder / Resolver Wiring Errors
This is where most downtime happens. Pinouts can vary across SM-series revisions.
Take a photo before disconnecting. Don’t rely on memory.
❗ Mechanical Alignment Issues
Improper alignment causes bearing failure within weeks.
Use a dial indicator if possible. At minimum, ensure no axial preload.
❗ Power Supply and Drive Matching
If you replace with a different torque class, your drive may trip on overcurrent.
Check motor rating vs. drive capacity before energizing.
❗ ESD Damage During Handling
Encoder electronics are sensitive.
I’ve seen a perfectly good motor fail after installation because someone handled the connector without grounding.